
EAISI EXPERIENCE LAB
2020 - 2021 ∙ TU/e Eindhoven Artificial Intelligence Systems Institute ∙ Parttime job ∙ AI ∙ Interactive demos
2020 - 2021 ∙ TU/e Eindhoven Artificial Intelligence Systems Institute ∙ Parttime job ∙ AI ∙ Interactive demos
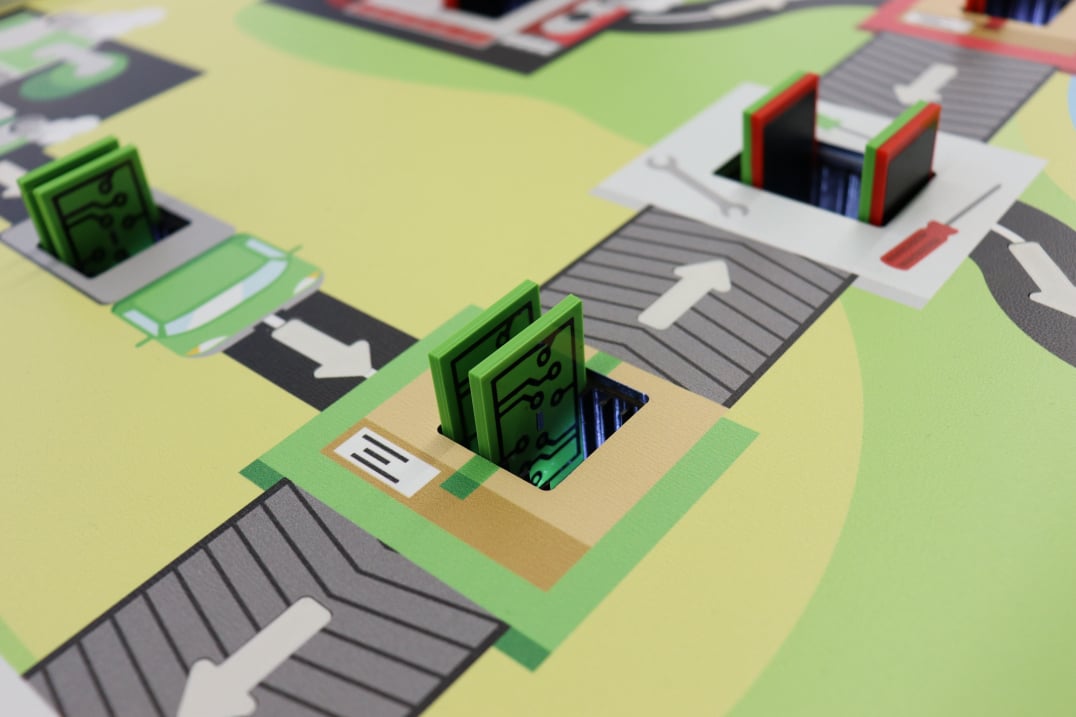
For a year I worked at the TU/e for EAISI to build the AI experience lab. In this lab, the AI research is showcased through tangible and interactive demos. One of the demos I worked on is the Supply Chain Management Game.
The original board game was made by Remco Dijkman and Willem Jaarsveld. With Buster Franken, Xander Verstraeten and Agoston Walter, I redesigned the board game to make it more engaging and intuitive and turned it into a semi digital game demo.
In creating the demo, I was mainly responsible for the graphical design of the board and user interface and the design of the play pieces (the tablet and game computer casings, and the electronics).




FruitPunch AI describes the challenge of the Agrosim project as: “Artificial Intelligence (AI) and robotics can help farmers to produce higher-quality food and have less impact on the environment. However, training and testing of agriculture robots is time consuming and expensive, because this usually happens in a physical environment and often involves the robot breaking down. In our project, we create a digital version of the robot that is tested and trained in a simulated environment. This way, training and testing of robots becomes faster and cheaper.”
In creating the Agrobot demo for the EAISI experience lab, I was responsible for designing and building the physical environment. The physical environment consists of three mesh panel hedges, decorated with fake hedera vines and three fruit crates. The hedges have magnetic ‘stems’, which the fruits can be attached to and plucked from. The fruits (lemons, strawberries and apples) are made from 3D-printed PLA.





This demo showcases how four little robots (Anki Vector) respond to each other and interact in order to collect cubes and deliver them across a maze.
For this project I had to re-design the arm of the Vector bots and the cubes so it would be easier for the robots to pick up the cubes when approaching them at an angle. The new design works with magnets which ensure that the cube shifts into the right place when the robot is near.
The maze is made from lasercut plywood. The stickers on the walls of the maze help the Vector bots orientate.
I worked on this demo with Jeroen Sies and Agoston Walker.





